16th August 2014 Swarm of 1,000 robots able to self-organise A huge, self-organising robot swarm consisting of 1,024 individual machines has been demonstrated by Harvard.
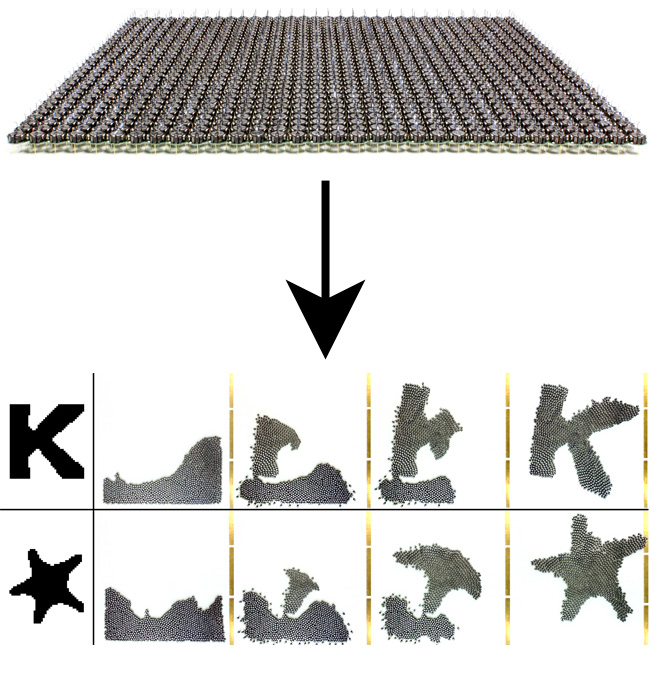
Swarm robotics is a new and emerging field of technology involving the coordination of multiple robots to perform a group task. By combining a large number of machines, it is possible to create a hive intelligence – capable of much greater achievements than a lone individual. In the same way that insects such as ants, bees and termites cooperate, researchers can build wireless networks of machines able to sense, navigate and communicate information about their surroundings. Recent efforts have included a formation of 20 "droplets" created by the University of Colorado, a group of 40 robots developed at the Sheffield Centre for Robotics, and drones using augmented reality to produce "spatially targeted communication and self-assembly". Although impressive, those projects – and others since – have lacked the raw numbers to be considered a genuine "swarm" like the creatures mentioned earlier. This week, however, scientists at Harvard took research in the field to a whole new level, by demonstrating a network of more than 1,000 machines working simultaneously. Known as "Kilobots", these devices are just a few centimetres across, roughly the size of a U.S. quarter. Each is equipped with tiny vibrating motors allowing them to slide across a surface, using an infrared transmitter and receiver to alert their neighbours and measure their proximity. From just a simple command, they can arrange themselves into a variety of complex shapes and patterns.
In 2011, open-source hardware and software was developed and licensed by Harvard to improve the algorithms used in machine networks. A report showed how groups of 25 Kilobots – demonstrating behaviours such as foraging, formation control and synchronisation – had the potential for much bigger numbers. Following three years of further testing and experimentation, the university has now succeeded in coordinating a swarm of 1,024 units. The new, smarter algorithm enables the Kilobots to correct their own mistakes, avoiding traffic jams and errors that would otherwise become more likely in larger-scale groups. If an individual deviates off-course, nearby robots can sense the problem and cooperate to fix it. As robots become cheaper and more numerous, with a continued trend in miniaturisation, this form of social behaviour could lead to revolutionary applications in the future. As Professor Radhika Nagpal explains in a press release: “Increasingly, we’re going to see large numbers of robots working together – whether it's hundreds of robots cooperating to achieve environmental cleanup or a quick disaster response, or millions of self-driving cars on our highways. Understanding how to design ‘good’ systems at that scale will be critical. We can simulate the behaviour of large swarms of robots, but a simulation can only go so far. The real-world dynamics – the physical interactions and variability – make a difference, and having the Kilobots to test the algorithm on real robots has helped us better understand how to recognise and prevent the failures that occur at these large scales.” These latest developments are reported in the peer-reviewed journal Science.
Comments »
|