2nd March 2022 NASA to fund research into future technology concepts NASA has announced its latest selections for the Innovative Advanced Concepts (NIAC) program, which funds research into long-term concepts that may be feasible over the next 10 to 40 years.
The agency has awarded a total of $5.1 million to 17 projects. Of these, 12 are brand new and entering Phase I study, while five are Phase II awards that will allow researchers to continue with prior work on developing concepts. "As in years past, our new group of NIAC fellows showcases the creativity and vision of the space community at large," said Michael LaPointe, acting program executive for the NIAC program at NASA Headquarters. "As we set our sights on ever more challenging destinations for exploration with humans and robots, innovative ideas and future thinking will be critical to helping us reach new milestones," said NASA Deputy Administrator Pam Melroy. "Concepts like those being studied with this new round of NIAC funding are helping us expand the scope of the possible, so we can make it reality." Some of the more notable concepts are listed below.
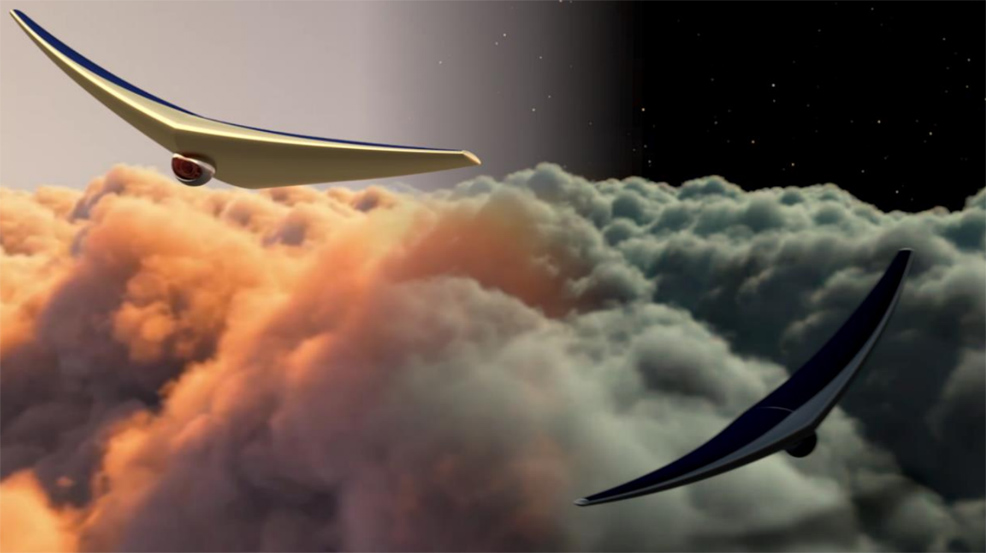
Bioinspired Ray for Extreme Environments and Zonal Exploration (BREEZE) This would combine inflatable structures with "bioinspired propulsion" to create a versatile flier, for exploring the upper atmosphere of Venus. If developed in the coming decades, BREEZE will navigate at altitudes of between 50 and 60 km, where the pressures and temperatures are remarkably similar to Earth, in stark contrast to the hellish conditions further below. It could ride zonal winds and overcome the meridional winds to circumnavigate the entire planet every 4-6 days. BREEZE would carry a large scientific payload with a wide array of instruments, radar, and cameras – including repeated sample collection abilities – able to provide a wealth of new data on this fascinating planet, while maintaining near-continuous communication with Earth via its orbiting module. "The bioinspired propulsion is achieved through oscillatory wing morphing, offering precise control and allowing for multiple flybys over the same location that can facilitate temporal atmospheric sampling," writes Javid Bayandor, Aerospace Professor at the State University of New York, the concept designer. "Inspired by the musculoskeletal system of a manta ray, its morphing wing articulation is distributed across many small electric actuators, effectively reducing the chance of total system failure," adds Bayandor. "The same actuators can be used for active volume reduction that enables buoyancy control with no added mass. To precisely determine attitude and position, BREEZE will use a combination of a star tracker, accelerometer, and gyroscope." Besides Venus, BREEZE could be deployed on other celestial bodies with adequate range of atmospheric densities such as Titan and Earth. This is a major advantage for the project, as it can be easily tested here in Earth's atmosphere, lowering associated risks. Having progressed to Phase II, BREEZE will now be undergoing its first physical tests with scaled models and eventually wind tunnel trials.
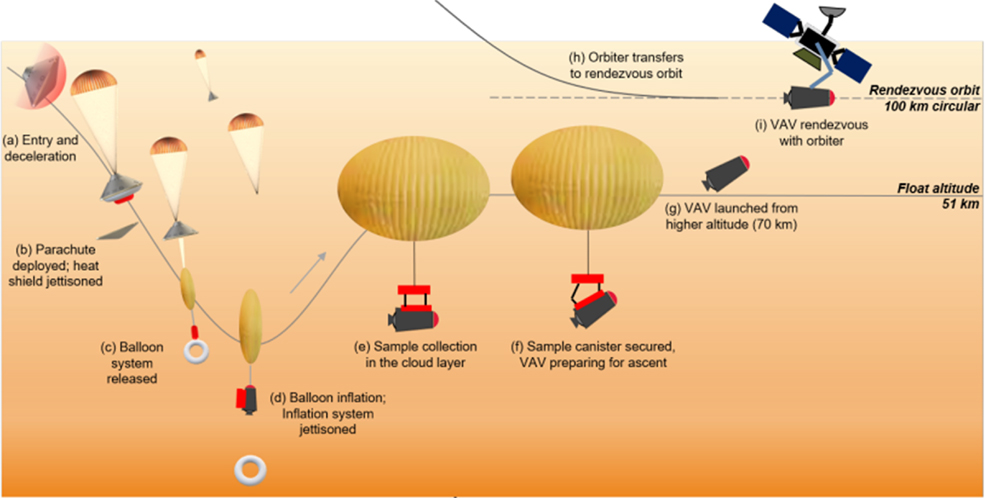
Venus Atmosphere and Cloud Particle Sample Return for Astrobiology Staying on the topic of Venus, this concept by Sara Seager, Professor of Physics and Planetary Science at the Massachusetts Institute of Technology (MIT), proposes a sample return mission focused on the atmosphere. "The mission goal is to bring back the sample for Earth-laboratory-based study to assess the habitability of the cloud-region of the atmosphere and search for signs of life or even life itself, in a much more robust way than possible in situ," she writes. "Earth laboratories have a wider variety of equipment that may reach more sensitive levels of detection as compared to in situ space-based instruments." For decades, people have speculated on Venus as a habitable world via its temperate cloud layer. Despite unique environmental challenges of the clouds, e.g. extremely low water content and the presence of concentrated sulphuric acid, long-standing and unexplained atmosphere measurements, as well as new findings and recent modelling, support the speculative idea that Venus may indeed be inhabited by microbes in an aerial biosphere. Despite renewed interest in Venus via two NASA and one ESA mission to launch in the late 2020s and early 2030s, astrobiology is not a focus. Seager's proposed mission concept has a two-component flight system, an entry probe and orbiter. The entry probe consists of a variable-altitude balloon operating between 45-60 km altitude above the surface. The balloon's gondola contains the sample capture hardware, as well as the ascent launch vehicle. Following several days of capturing samples from different atmosphere locations, the aerial platform would rise to about 70 km altitude, the ascent vehicle would launch and rendezvous with the orbiter, followed by return to Earth and sample container recovery.
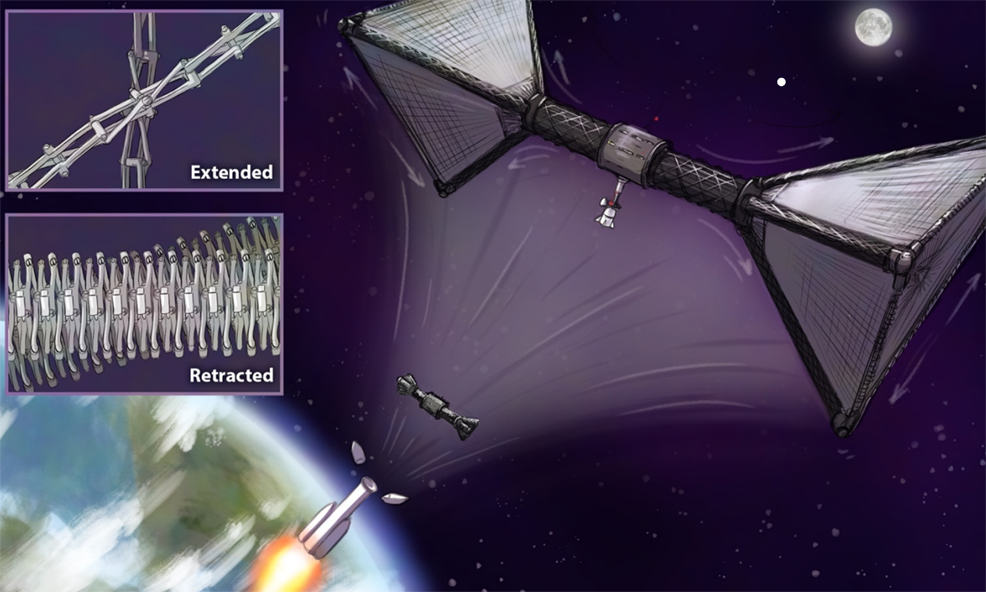
Kilometre-Scale Space Structures from a Single Launch A sustained human presence in space has been the core goal of NASA for decades. The agency's recent plan for sustained lunar exploration and development lays out a vision for long-term human exploration of cislunar space, on the lunar surface, and on Mars as part of the Artemis program. Long-duration spaceflight poses serious challenges for the human body – including muscle atrophy, bone loss, eyesight degradation, and immunosuppression. Many of these effects are linked to a lack of gravity. Although significant progress has been made in mitigating individual symptoms associated with long-term zero-g exposure, the ability to generate artificial gravity would eliminate the root cause of many problems and could greatly improve the health of crews undertaking long-duration missions. Concepts for rotating space habitats as a means for generating artificial gravity date back more than a century. However, humans suffer discomfort from exposure to rotation rates as low as 3 RPM. To produce artificial gravity near 1g at rotation rates of 1-2 RPM, a kilometre-scale structure is needed. Zac Manchester, Assistant Professor of Robotics at Carnegie Mellon University, has presented an innovative solution. The core idea is a high-expansion-ratio deployable structure (HERDS) built from mechanical metamaterials. "Specifically, we exploit two kinematic discoveries made in the last five years: shearing auxetics and branched scissor mechanisms," he writes. "We intend to produce tube structures with an unprecedented 150x expansion ratio. Our Phase I NIAC study has demonstrated the viability of this approach and pointed us to several technical problems that must be addressed in Phase II. The key technical work in Phase II will be focused on four specific thrusts: 1) modelling and understanding the complex deployment dynamics of our expanding hierarchical structure in detail; 2) mitigating jamming during deployment in the presence of manufacturing errors and external disturbances using simulation and design optimisation; 3) rapid prototyping and hardware-based design iteration to calibrate models and evaluate sub-system components; and 4) experimental validation of metre-scale prototypes with thousands of links to demonstrate deployment without jamming and high expansion ratios." This work will have both immediate and long-term impacts for NASA's objectives, according to Manchester. In the near term, such a structure would make a sustained human habitation in cislunar space – for example, as part of the Lunar Gateway – possible. In the medium-to-longer term, such structures will be critical to sustaining humans in deep space. Finally, large expandable structures will also advance astronomy, by supporting large-scale telescope arrays.
ReachBot: Small Robot for Large Mobile Manipulation Tasks in Martian Cave Environments ReachBot is a concept designed by Marco Pavone, Assistant Professor of Aeronautics and Astronautics at Stanford University. This would provide "a mobility and mobile manipulation platform that uses lightweight extendable booms to achieve large reach with a small footprint – giving it unique access to steep, vertical, and overhanging surfaces in Martian caves." Navigating these surfaces is crucial for bringing instruments in contact with targets of major geological and astrobiological interest. In Phase I, Pavone and his team investigated key feasibility aspects crucial to a cave exploration mission. In particular, they showed that (1) ReachBot has a significantly expanded reachable and wrench workspace compared to alternative designs, (2) lightweight surface grasping solutions with spiny grippers can reliably grasp onto rocky surfaces with passive actuation, and (3) ReachBot's enhanced mobility and manipulation strength enable new access to significant scientific targets. In Phase II, Pavone intends to refine and augment these previous feasibility studies, with a key focus on addressing system robustness and the end-to-end concept validation. He will optimise ReachBot's reachable workspace, enhancing its ability to overcome the limitations of other robots in cavernous environments while maintaining stable configurations. He will develop a strategy to locate, select, and evaluate grasping sites that have a high probability of successful grasping with lightweight grippers. Controllers that actively damp oscillations in the booms will be developed, making ReachBot more robust to the dynamic response of a sudden grasp failure. He will also study ReachBot's performance in a realistic mission environment. "By outlining a detailed notional mission, we will determine realistic operational constraints for ReachBot," Pavone writes. "Then, we will conduct field tests to demonstrate the feasibility of our proposed concept for real-world deployments."
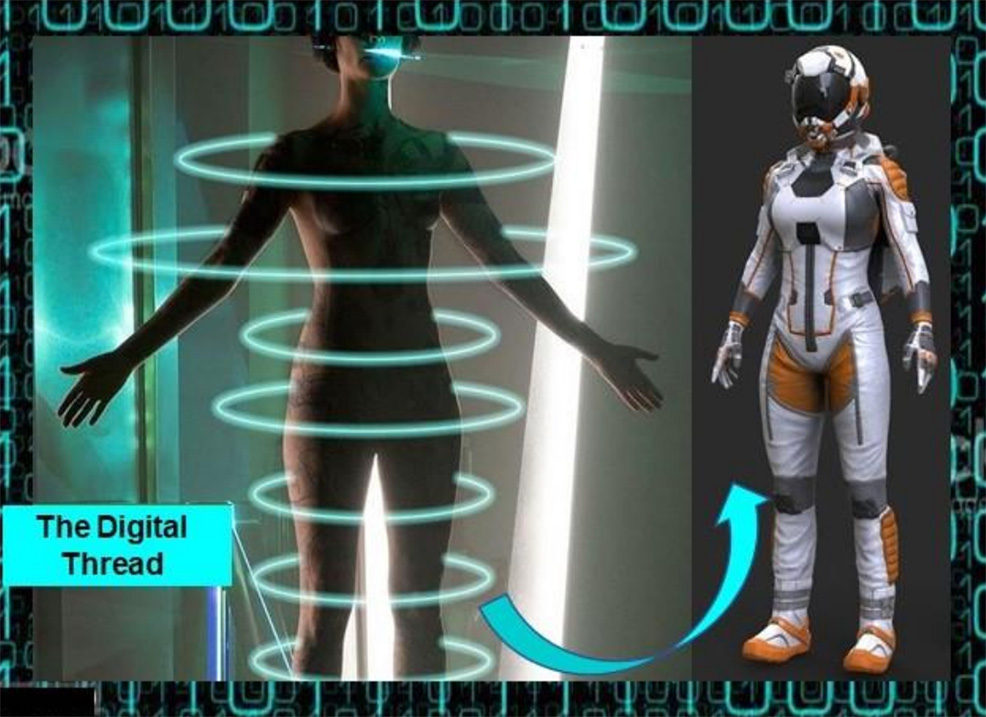
The Spacesuit Digital Thread: 4.0 Manufacture of Custom High Performance Spacesuits for Exploration of Mars This proposal is by Bonnie Dunbar, Professor of Aerospace Engineering at Texas A&M, and a retired NASA astronaut. It seeks to investigate the feasibility of manufacturing "custom" cost-effective, high performance exploration spacesuits for Mars and beyond utilising the Digital Thread (DT). This concept integrates digital analytic components for manufacturing in development of the final spacesuit. The vision is for a "digital human scan to digital design/analyses to robotic manufacture". This approach would address several problems with deep space travel: 1) the ability to rapidly design and manufacture Extravehicular Activity (EVA) space suits which are best suited to the anthropometrics of individual crewmembers (male and female) in any gravitational environment; 2) the need to build and continually modify digital twins, based on lessons learned and design optimisation, 3) the ability for crew in deep space to manufacture or repair some EVA suit components in-situ, based on digital files, and 4) the ability to digitally incorporate the EVA suit into the entire Mars mission architecture and operations, including resupply, in-situ repair and fabrication and repurposing of in-situ materials. Human missions to Mars in the 2030s are expected to involve nearly daily spacewalks in EVA suits. These suits are considered to be anthropometrically shaped "space ships" which must protect the crew from extreme environments, while at the same time, providing the mobility required to effectively perform both engineering and scientific exploration tasks outside of the habitat or spacecraft. During the Space Shuttle Program (1981-2011), a total of 18 suits were built to support nearly 200 astronauts. But for a variety of reasons, not all selected and trained astronauts could fit into or function in the suit, and many crewmembers experienced shoulder injuries, pressure points, fingernail loss, and a nearly 50% loss of effective strength due to the pressure resistance of the suit. New, personalised EVA suits are needed, which can be manufactured in a rapid and cost-effective manner, says Professor Dunbar. Can this be achieved using the latest scanning technologies, human factor studies, physiological data, additive manufacturing, robotics, and modern digital design and analysis tools? The main aim of her feasibility project is to answer those questions by determining how the "Digital Thread" process can be used to develop a digital manufacturing stream which will provide any sized or shaped crewmember (or future tourist) with an optimised EVA space suit. The study will identify all key components of a spacesuit and current manufacturing technologies; map those to DT components; identify technology gaps; benchmark required technologies and capabilities in industry, academia, and government; and develop a conceptional model for future spacesuit development and operational support.
Comments »
If you enjoyed this article, please consider sharing it:
|