|
|
|
|
|
|
|
10th July 2025
Grok 4 brings ARC-AGI breakthrough closer
xAI's new model, Grok 4, has reached a major milestone in reasoning tasks, doubling the previous record on a key metric. Rapid gains suggest artificial general intelligence (AGI) could be closer than many thought.
Read more... |
|
|
|
|
|
|
13th January 2025
UK aims to be "AI superpower"
The UK government has today announced a plan for using AI to boost growth and deliver public services more efficiently. Prime Minister Sir Keir Starmer told reporters that AI "will drive incredible change" and pledged to make the UK a world leader in the technology.
Read more... |
|
|
|
|
|
|
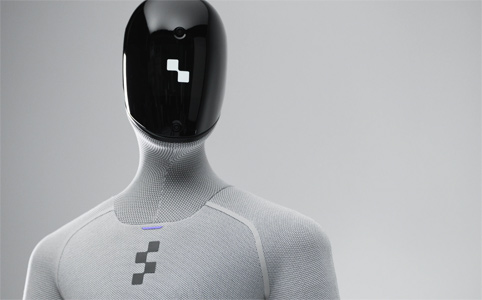
4th December 2024
Robot persuades other robots to "go home"
A robot in China recently convinced other robots to leave their posts and "go home" in an unscripted event. This viral video highlights both the potential and concerns surrounding autonomous machines.
Read more... |
|